مترجم: علی سعیدی
رباتها وسایلی هستند که همیشه مارا شگفتزده و مجذوب خود میکنند! توانایی آنها در واکنش و حرکت بهصورت خودکار، چه به لحاظ بصری و چه ذهنی دلفریب و وسوسهانگیز است. ما در مورد رباتها مینویسیم، از آنها در فیلمها استفاده میکنیم و در انجام کارهای بسیار سادهای مثل چرخاندن یک دستگیره در به تماشای آنها مینشینیم. برای سالها، رباتها در کارخانههای صنعتی مورد استفاده قرار میگرفتهاند؛ ولی تاکنون، بهصورت جدی مورد توجه معماران نبودهاند.
بله میتوان گفت بعضی از معماران مانند گروه آرشی گرام به تخیلات خود اجازه پرواز داده؛ و طرح «شهر متحرک» را خلق کردهاند؛ ولی خیلی از معماران تفکر ساخت بهوسیله رباتها نداشتهاند.

ولی اکنون در عصر دیجیتالی کردن، عصر مجازی سازی و عصر اتوماسیون، به نظر میرسد رابطه بین رباتها و معماران در حال شکوفایی است.
اکنون همچنان به خواندن خود ادامه دهید تا با پنج ربات که بناهای معماری میسازند آشنا شویم.
[divider]روب | آرش[/divider]


سال ساخت :۲۰۱۲ ( جهت ساختوساز، هنر و طراحی)
در همایشی در سال ۲۰۱۲ تمایل و علاقه معماری به رباتها توسط روب/آرش بهخوبی نمایش داده شد. همایش حول موضوع: «فراهم آوردن بستری جهت ابداع راههای استفاده از رباتها در بنا کردن سازهها و همچنین گرد هم آوردن اعضای جامعه دانشگاهی و صنعتی مانند معماران، هنرمندان و طراحان برگزار شد»
((همایش توسط شرکت Sigrid Brell-Cokcan and Johannes Braumann برگزار شد )) همچنین این همایش حضور معماران را مشروط بر شرط زیر نمود: «معماران علاوه بر ارائه تحقیقات و پروژههای خود به اعضای دو جامعه دانشگاهی و صنعتی باید در کارگاههای رباتیک موجود در سراسر اروپا بهعنوان همکار ایفای نقش کنند» تکنولوژی کنترل رباتها و بازوهای مکانیکی خاص، بهصورت ویژهای انعطافپذیر و قابلانتقال به رشتههای معماری و طراحی هستند. از طریق مشارکت ربات KUKA (ربات ساز) و نرمافزار راینو و Grasshopper (پلاگین راینو)، طراحان نهتنها امکان کنترل رباتها بهوسیله برنامههای متداول معماری رادارند بلکه میتوانند روند ساخت را بهصورت دیجیتالی شبیهسازی کنند. این رابط بصری و شبیهساز دیجیتالی، به یک هنرمند این امکان را داد که بدون دانش رایانهای قبلی بنای Red Bull Arch را طراحی و بهوسیله روب/آرش بسازد.
[divider]دیوار برنامه دار[/divider]
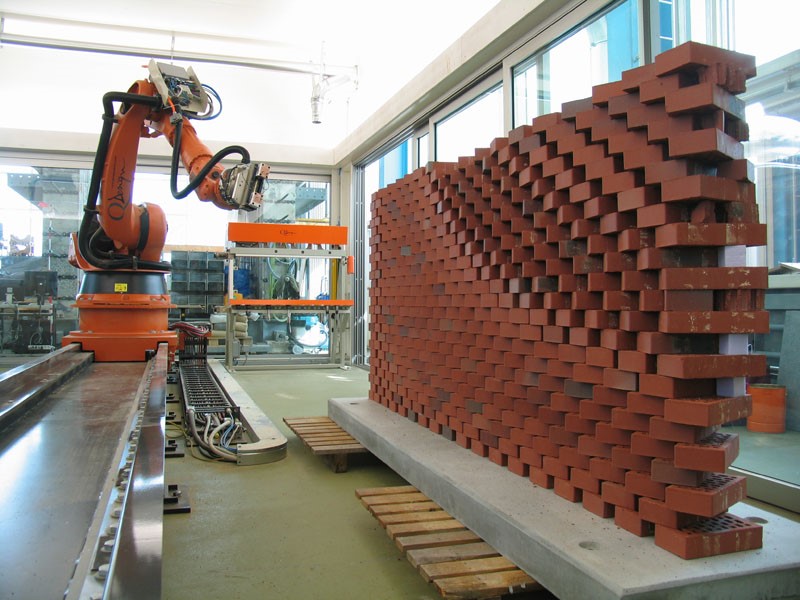

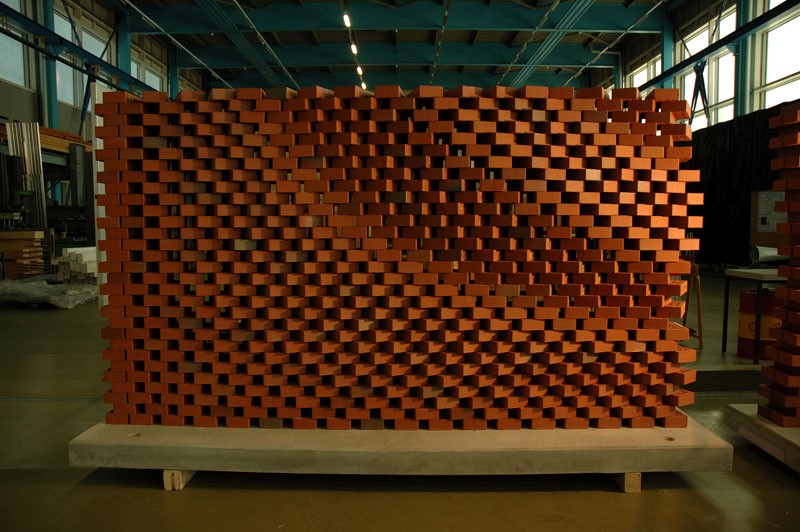
در انستیتو علمی زوریخ (ETH ZURICH) دو شرکت معماری GRAMAZIO و KOHLER که همکاری آنها در زمینهی معماری و علمی بهخصوص کمک در ساخت سازههای دیجیتالی و رباتیک معروف است؛ در کلاس درس با استفاده از یک بازوی رباتیک یک دیوار را آجرچینی کردند. آنها کلاس خود را اینگونه توصیف میکنند: اگر پایهایترین شرایط معماری از حالت سنتی و دستی به حالت دیجیتال تغییر کند، چه پتانسیلی برای قدیمیترین و متداولترین سازه یعنی آجر ایجاد میشود دانشجوها این سؤال را در ورک شاپی چهار هفتهای موردبررسی قراردادند و دیوارهایی را طراحی کردند تا بهوسیله یک ربات صنعتی ساخته شود. برخلاف یک بنّا، ربات میتواند هر آجر را در موقعیتی متفاوت قرار دهد؛ بدون اینکه نیاز بهاندازه گری یا دید بصری داشته باشد. برای بهرهگیری از این پتانسیل، دانشجوها الگوریتم طراحی را ارائه دادند که با توجه به منطق رویه (روند متداول چینش آجرها) موقعیت مکانی هر آجر را در فضا مشخص میکرد. استفاده از این الگوریتم، امکانی را فراهم میکرد که با استفاده از بیش از ۴۰۰ آجر، دیواری ساخته شود؛ که هرکدام از آجرها در موقعیت و چرخش خاص خود بودند. درواقع دانشجوها هندسه دیوار را تعریف نمیکردند، بلکه منطق چینش آجرها را تعریف میکردند و بدین ترتیب یک سازه معماری شکل میگرفت.

[divider]Flight-Assembled Architecture [/divider]


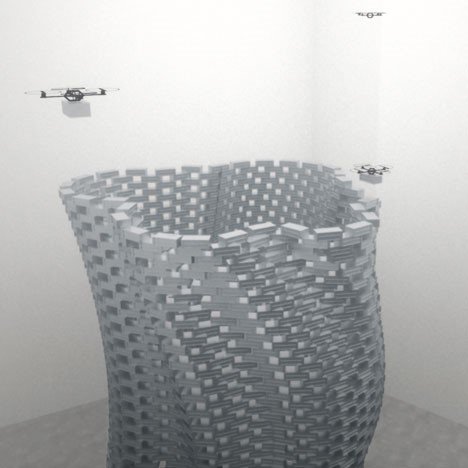
اگرچه بازوهای مکانیکی متداولترین فرم از رباتها در معماری هستند، اما معماران و طراحان شروع به استفاده از استراتژی دیگری برای ساختوساز کردند. اخیراً Gramazio & Kohler با همکاری Raffaello d’Andrea نمایشگاهی با موضوع (معماری مونتاژ پرواز) ترتیب دادهاند که در آن با استفاده از کوادکوپترهای کوچک، دیواری به طول ۳.۵ و ارتفاع ۶ متر را به کمک ۱۵۰۰ فوم پلیاستری ساختند. این نمایشگاه در اورلئانز فرانسه برگزار شد.
[divider]ساختمانهای رباتیک [/divider]

Stephen A. Gage و Will Thorne توانایی رباتها را در نمای ساختمان موردبررسی قراردادند. سال گذشته در مقالهای در Technoetic Arts، آنها وسیلهای را که
“Edg monkey” صدا میزدند بررسی و توضیح دادند. آنها پیشنهادی مبنی بر سامانهای از رباتهای کوچک که میتوانند نمای یک ساختمان را تنظیم کنند بهعبارتدیگر آنها مصرف انرژی و شرایط داخل ساختمان را با استفاده از چک کردن ترموستات، بستن پنجرهها، تنظیم پردهها و… کنترل میکنند. این رباتها حتی میتوانند با ساکنین ساختمان ارتباط برقرار کنند و آنها را از میزان مصرف و اتلاف انرژی خود مطلع سازند.
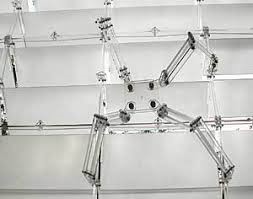
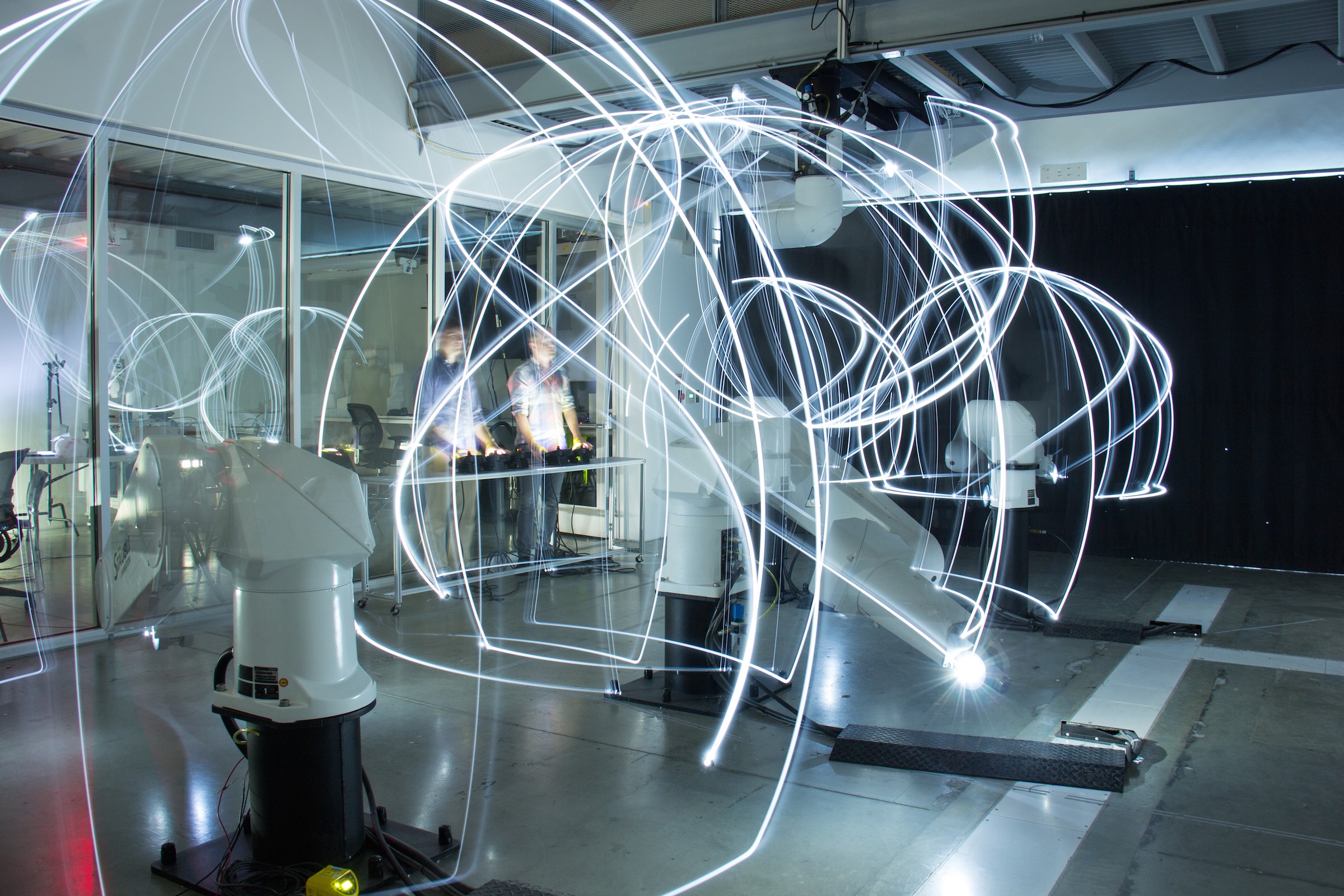
[divider]Sci-Arc Robot House[/divider]
پیتر تستا و دیوین وایزر، شرکای تستاوایزر و دانشکده علوم و علوم انسانی معتقدند که پتانسیل و توانایی رباتها در کارکردن بهصورت هماهنگ و گروهی است. آنها با ساخت ربات جدید SCI/ARC به نام “ROBOT HOUSE” که هرکدام شامل ۵ بازوی مکانیکی است؛ قصد دارند که به دانش آموزان حرکت مشترک رباتهایی که بهصورت موازی و هماهنگ کار میکنند را یاد بدهند؛ که این حرکات از فرایند خطی و یکنواخت در ساختوساز فارغ هستند. آنها رباتهایی را تصور میکنند که نهتنها در ساختوساز و چینش، بلکه در طراحی و روند ساخت نیز دخیل هستند. آنها این روند را “real-time…platform” مینامند که میتواند بهطور سودمندی غیرقابلپیشبینی باشند. بهطورکلی آنها قصد دارند شروع به گسترش این گروههای رباتیک جهت آزمایش در طراحی سازهها بهصورت «خودعامل» از طریق منطقها و ایستگاههای از پیش تعیینشده عمل کنند. همچنین آنها انتظار دارند رباتها بهگونهای مجهز شوند تا بتوانند در شرایط سخت و فضاهای کوچک و پیچیده کار کنند و قادر به کار مستقیم در محل ساختوساز باشند. به نظر شما چگونه میتوان از رباتها در معماری استفاده کرد؟

منبع: archdaily